1. REMUS 600 REMUS 600是由海洋探测系统(Hydroid, Inc.)开发的一种中型自主水下航行器。这种AUV主要用于军事、科研和商业领域,例如海洋勘探、水下地形测绘、生物和环境监测等。下面是一些具体的特点和功能: 尺寸与重量:REMUS 600的长度通常在3到4米之间,直径约为32厘米。这种AUV的重量大约在240公斤左右,使其适用于多种部署方式。
航速与续航力:它的最大航速可达到4节(大约7.4公里/小时),在较低的速度下可以实现更长的续航时间。REMUS 600能够在水下持续工作24小时以上,这使得它能够完成长时间的任务。
深度能力:这种AUV能够潜入600米的深度,适用于大多数的沿海和开放海域任务。
传感器与设备:REMUS 600可以搭载多种传感器和设备,包括声纳、摄像头、水文学仪器和环境监测设备等。这使得它能够执行多种复杂任务,如海底地图绘制、目标搜索和采样。
导航与控制:它采用精确的导航系统,包括惯性导航系统(INS)、GPS、多普勒测速仪等,以确保精准定位和航迹控制。
应用领域:REMUS 600不仅在军事领域中被广泛使用,还在科学研究和商业勘探中发挥着重要作用。比如,在海洋生物研究、考古发掘、油气勘探等领域都有其身影。
2. SeaBED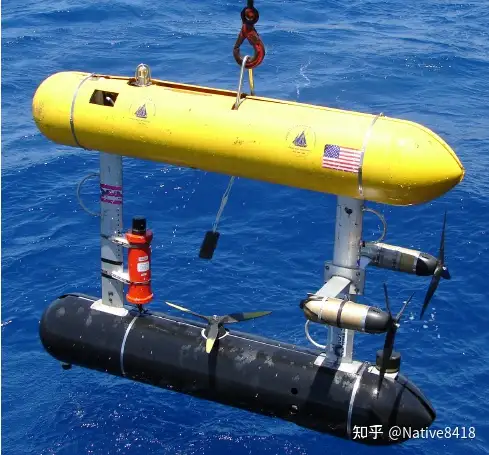 SeaBED型AUV是一种特别设计的自主水下航行器,主要用于海洋底部的详细勘探和映射。这种AUV具有以下几个特点: - 高精度映射能力:SeaBED型AUV配备了先进的声纳系统,这使得它能够在海底进行高分辨率的地形和生物群落映射。这对于科学研究和海洋资源勘探非常重要。
- 低速悬停和慢速航行:与其他类型的AUV相比,SeaBED可以以非常低的速度运行,甚至能在水下悬停。这一特点使得它在进行详细的海底观测和采样时更加精准。
- 深度:SeaBED AUV能在相对较深的水域中操作,这使得它能够探索一般潜水器难以到达的地方。
- 高度自主性:作为一种自主水下航行器,SeaBED能够在水下独立执行预设的任务,不需要船只或人类操作员的实时控制。它可以根据预先编程的路线自主航行,收集数据并返回起始点。
- 应用领域广泛:SeaBED型AUV不仅可以用于海洋科学研究,还可以应用于海洋资源勘查、环境监测、以及海底基础设施的检查和维护等领域。
- 稳定的设计:它的设计注重稳定性和耐用性,能够在复杂的海洋环境中长时间稳定工作。
总的来说,SeaBED型AUV是一个高度专业化的海洋勘探工具,它在海底详细地形和生物群落映射方面具有独特的优势。通过它收集的数据对科学研究和海洋资源管理都非常有价值。 3. Iver3 Iver3型AUV是一种先进的自主水下船,广泛用于海洋和淡水环境的科学研究、军事侦察和商业勘探。这种AUV由OceanServer Technology公司开发,具有以下特点: - 尺寸和设计:Iver3 AUV体积相对较小,便于携带和部署。它的流线型设计有助于提高在水下的机动性和稳定性。
- 传感器和仪器:它配备了多种传感器和仪器,如声纳、温度计、盐度计、水深计和GPS等,能够收集各种海洋数据。这些传感器对于海洋科学研究、环境监测和海底地形测绘等领域至关重要。
- 自主性和通信:Iver3 AUV能够进行高度自主的操作,可以预先编程执行复杂的任务。同时,它通过无线和有线方式与操作者通信,传输数据和接收指令。
- 耐用性和续航力:这种AUV设计用于在恶劣的海洋环境中工作,具有良好的耐用性和可靠性。它的电池续航力较长,能够支持数小时甚至更长时间的连续操作。
- 应用领域:Iver3 AUV在多个领域都有应用,包括环境监测、海洋研究、军事侦察、水下考古和油气勘探等。它的灵活性和多功能性使其成为这些领域的重要工具。
- 用户友好性:尽管Iver3是一种高科技设备,但它的用户界面设计得非常友好,便于操作者进行编程和数据分析。
总的来说,Iver3型AUV是一种多功能、高效的自主水下船,它通过其先进的技术和灵活的应用能力,在多个海洋相关领域发挥着重要作用。 4. REMUS 100 Remus 100型AUV是一种小型、灵活的自主水下无人航行器,主要用于海洋研究、水下地图绘制、水下考古、以及军事侦察等任务。它由美国海洋系统公司(Hydroid, Inc.)设计和制造。 主要特点: - 尺寸与重量:Remus 100较小巧,长度一般在1.5米左右,重量约40公斤,便于单人操作和部署。
- 深度能力:通常能够下潜到100米至200米的深度,适合近岸和浅海作业。
- 耐力与速度:可以持续工作约8至12小时,最高速度可达4节(约7.4公里/小时)。
- 传感器与设备:配备多种传感器,如侧扫声纳、多波束回声测深仪、底质分析仪等,用于收集水下数据。
- 导航与控制:利用声学、惯性、GPS等多重导航系统进行精确定位,可通过预设任务或远程控制进行操作。
与其他型号的区别: Remus 100型AUV与其他型号(如Remus 600、Remus 3000等)的主要区别在于尺寸、深度能力、耐力和应用领域。 - 尺寸和重量:Remus 100是较小型的AUV,适合单人操作。相比之下,如Remus 600型号更大,更适合深海作业。
- 深度能力:Remus 100主要用于浅水区域,而如Remus 600能下潜至600米,Remus 3000甚至能下潜至3000米。
- 耐力:更大型的AUV如Remus 600和Remus 3000,由于体积更大,通常能装载更多的电池,从而有更长的续航能力。
- 应用领域:由于其体积和性能特点,Remus 100更适合近海和浅水区域的研究和作业,而更大型的型号则更适合深海探索和长时间的海洋任务。
总的来说,Remus 100型AUV以其小巧灵活、操作简便的特点,在近海和浅水区域的科研和商业活动中发挥着重要作用。与其他型号相比,它在深度能力和续航能力上有所限制,但在适用的领域内表现出色。 5. Bluefin-21 基本信息: - 开发者:Bluefin Robotics公司。
- 类型:自主水下航行器(AUV)。
- 目的:用于海洋勘探、数据收集、地形测绘等。
- 应用:2014年,Bluefin-21曾在马来西亚航空MH370的搜寻行动中被使用,负责在印度洋海底进行搜索。
技术特点: - 尺寸与重量:长度约4.93米,直径21英寸(约53厘米),重量在750公斤左右。
- 深度能力:最大下潜深度可达4500米,适用于深海作业。
- 耐力与速度:Bluefin-21能在4节的速度下连续工作25小时,覆盖约125公里的距离。这种高效能力使其在长时间的海洋任务中表现出色。
- 传感器配置:配备多种传感器,包括侧扫声纳、多波束回声测深仪和高分辨率相机等,用于详细的海底地形测绘和影像采集。
- 导航系统:利用惯性导航系统和卫星定位系统进行精确导航。
与其他型号的区别: - 相比较小型的AUV,如Bluefin-9,Bluefin-21有更大的尺寸和更强的载荷能力,可以携带更多科学仪器。
- 与同公司的其他型号如Bluefin-12相比,Bluefin-21的下潜深度更深,适用于更深海域的勘探。
- 相较于一些专用于特定任务的AUV,如水雷探测或者海底油气勘探专用AUV,Bluefin-21更加多功能,能够执行多种不同的海洋勘探任务。
- 在耐久性和航行时间上,Bluefin-21也展现出较高的性能,能多满足长时间、深海的作业需求。
总体来说,Bluefin-21型AUV是一种多功能、高耐久性的深海作业工具,适用于各种复杂的海洋环境和任务。与其他型号相比,它的优势在于更深的下潜能力、更长的续航时间和更强的载荷能力。 6. Echo Ranger Echo Ranger是由波音公司制造的一种海洋自主水下无人航行器(AUV)。这种AUV最初在2001年制造,主要用于为石油和天然气公司(例如埃克森美孚公司)捕获海床的高分辨率声纳图像。它的尺寸为5.5米长,1.27米宽和高,可以达到最大速度8节,通常运行速度在3到6节之间。它的续航能力为28小时,但可以配置成可执行长达30天的任务。Echo Ranger的测试深度为3,050米(10,010英尺)。 Echo Ranger的设计使其能够在不需要操作员直接控制的情况下执行预先规划的任务。这使得研究人员可以在AUV潜水时进行其他项目的工作。相比于ROVs(远程操控水下航行器),AUVs可以更紧凑、更轻便,这意味着它们可以在更小、成本更低的船只上运输。这种多功能性允许在一个区域部署多个AUV,从而对海底和水柱进行广泛的监视。 与其他型号的AUV相比,Echo Ranger具有其独特的特点。例如,与波音的另一型号Echo Seeker相比,Echo Seeker是一个32英尺长的车辆,能够下潜20,000英尺,扩展了Echo Ranger的能力,包括更深的下潜和更重的载荷。波音的另一个型号Echo Voyager,则是基于Echo Ranger和Echo Seeker的发展而来,它是一个完全超大型的AUV。 Echo Ranger最初被用于油气行业的海底声纳成像,但随后也被测试用于可能的军事用途,例如在敌方水域跟踪目标、巡逻本地港口以检测国家安全威胁,以及扫描海洋底部以检测环境危害。 总体来说,Echo Ranger是一个多用途、高效能的自主水下无人航行器,能够在没有人类直接控制的情况下执行复杂任务,这使其在海洋探索、监视和环境测试等多个领域中具有重要作用。 7. Gavia Gavia型AUV(Autonomous Underwater Vehicle,自主水下航行器)是一种高度灵活的无人水下航行器,它由冰岛的Teledyne Gavia公司生产。这款AUV因其模块化设计而闻名,这意味着它可以根据不同的任务需求进行快速和灵活的配置。 Gavia型AUV的主要特点: - 模块化设计:Gavia型AUV最显著的特点是其模块化设计。这种设计使得用户可以根据特定的任务需求来添加或移除模块,例如传感器模块、电池模块、导航模块等。这种灵活性使得Gavia型AUV可以广泛应用于科学研究、军事、商业勘探等多个领域。
- 小型化与便携性:与大型AUV相比,Gavia型AUV体积较小,便于运输和部署。这使得它们非常适合在较浅的水域以及对运输和快速部署有特别要求的任务。
- 多种传感器选项:Gavia型AUV可以配备多种传感器,包括声纳、摄像头、化学检测仪器等,这使得它能够执行多种类型的探测任务。
- 用户友好的操作界面:Gavia型AUV配备了易于使用的控制软件,这使得操作人员可以方便地规划任务和处理数据。
- 高度自主性:Gavia型AUV能在没有人为干预的情况下执行复杂任务,它通过先进的导航系统和自主决策算法实现这一点。
与其他AUV型号的比较: - 与传统AUV相比:相比于更传统、非模块化的AUV,Gavia型提供了更高的灵活性和任务适应能力。传统AUV通常为特定任务设计,而Gavia型可以通过更换模块快速适应不同任务。
- 尺寸和携带能力:Gavia型AUV通常比大型AUV小巧,易于携带和部署,尤其适合于近海和浅水区域的任务。然而,这也意味着它可能没有一些大型AUV那样的深水能力或更长的续航时间。
- 成本效益:由于其模块化设计,Gavia型AUV在维护和升级方面可能比一些非模块化的AUV更具成本效益。
总的来说,Gavia型AUV的主要优势在于其模块化设计,它提供了高度的灵活性和多功能性,适用于各种不同的水下任务。与其他型号相比,它在灵活性、用户友好性和适应性方面具有明显优势,尤其适合需要快速配置和部署的场景。 8. HUGIN Superior HUGIN Superior是挪威公司Kongsberg Maritime生产的一系列高性能自主水下航行器(AUV)中的一种。这款AUV被设计用于执行一系列复杂的海洋勘探任务,包括海洋地质调查、环境监测、水下基础设施检测等。 相比其他型号的AUV,HUGIN Superior具有以下几个显著特点: - 续航能力: HUGIN Superior的续航能力非常强,可以在水下连续作业达到70小时以上。这得益于其高效的能源管理系统和大容量的电池。这一点与其他型号的AUV相比,提供了更长时间的作业能力,减少了频繁充电或更换电池的需要。
- 传感器和仪器配置: HUGIN Superior配备了先进的传感器和测量仪器,包括多波束回声探测器、侧扫声纳、次底层剖面声纳、高分辨率相机等。这使得它能够提供比其他型号更高质量和更详细的海底图像和数据。
- 深度能力: 它能够在更深的水域中操作,最大作业深度可达6000米。对于需要在深海环境中进行科学研究或商业勘探的任务来说,这是一个重要的优势。
- 数据处理和传输能力: HUGIN Superior拥有强大的数据处理能力,能够在AUV内部实时处理和分析收集到的数据。同时,它也具备先进的数据传输系统,能够在水下高效、迅速地将数据传输回母船或岸基站。
- 可操作性和灵活性: 此型号的AUV设计考虑到了用户的易用性和操作的灵活性。它的系统允许操作员通过简化的界面进行控制,且能够灵活调整任务参数以适应不同的作业需求。
总的来说,HUGIN Superior在续航力、深度能力、传感器配置和数据处理能力方面都展现出了与其他型号AUV的显著区别,使其成为执行复杂、深水海洋任务的理想选择。 9. Echo Surveyor搜索出来的基本都是类似图片,应该没找错Echo Surveyor型自主水下航行器(AUV)是一种先进的海底勘测工具,主要用于海洋地质和地球物理勘探。这种AUV能在深海环境中独立操作,执行数据收集和分析任务,尤其适用于海底地形测绘、海底矿产资源评估、环境监测等领域。 Echo Surveyor型AUV的显著特点包括其先进的导航系统、高效的能源管理和可携带多种传感器。这种AUV通常装备有侧扫声纳、多波束测深仪、地质声学剖面仪和其他地球物理传感器,以获得高分辨率的海底图像和数据。 与其他型号的AUV相比,Echo Surveyor的区别主要在于: - 高级导航系统:Echo Surveyor型AUV采用精确的惯性导航系统和声学定位技术,能在深海中进行精准的长时间任务。
- 深水作业能力:这类AUV设计用于在极深的水域工作,其深水作业能力通常优于其他一些针对浅水或中等深度设计的AUV。
- 高度集成的传感器系统:Echo Surveyor型AUV可以装备多种传感器,以进行综合性的海底勘查。这种多功能性使其在复杂任务中表现优异。
- 能源效率:这种AUV在设计上注重能源效率,以支持长时间的自主作业,减少需要返回表面充电或维护的次数。
- 适用性广泛:由于其高级的技术配置,Echo Surveyor型AUV不仅适用于商业海洋勘探,也适合科学研究和环境监测等领域。
综上所述,Echo Surveyor型AUV以其深水作业能力、高级导航系统、多功能传感器配置以及高效能源管理,在海洋勘探领域中占有独特的地位。 10. Bluefin-12 Bluefin-12型自主水下航行器(AUV)是由美国Bluefin Robotics公司开发的一种高级水下无人机。这种AUV设计用于执行多种水下任务,包括海底测绘、考古、资源勘探和科学研究。下面详细介绍一下Bluefin-12型AUV的特点以及它与其他型号的区别: - 尺寸和重量:Bluefin-12相较于其他型号如Bluefin-21,体积更小,重量也更轻,这使得它更适合快速部署和回收,尤其在那些空间和运输能力受限的情况下。它的体积和重量适中,适合在各种环境中灵活操作。
- 传感器和设备:这种AUV配备了高级的传感器和设备,如侧扫声纳、多波束回声测深仪和地下探测雷达等。这些高端设备使其在执行海底测绘、考古调查等任务时效率更高。
- 耐久性和深度:Bluefin-12设计用于在相对较深的水域工作,具有良好的耐压性能和较长的续航时间。这使它能够在更多样化的海洋环境中进行作业。
- 数据处理能力:这款AUV拥有先进的数据处理系统,能够在水下实时处理和分析数据,提高了数据收集和解释的效率。
- 与其他型号的区别:与Bluefin公司的其他型号相比,Bluefin-12可能在尺寸、携带的传感器类型、深度能力和任务灵活性方面有所不同。例如,相较于更大型的Bluefin-21,Bluefin-12可能更适用于浅水区域和更小规模的任务。同时,它在操作和部署方面可能比大型AUV更为便捷。
总结来说,Bluefin-12型AUV是一种多功能、适应性强的水下无人机,它在尺寸、传感器配置和任务适应性方面与其他型号有所不同,使其在特定类型的水下任务中表现出色。 11. Artemis Artemis型AUV是一种先进的自主水下航行器,通常用于海洋研究、水下勘探和军事应用等领域。它配备了高级的传感器和导航系统,能够在复杂的水下环境中独立操作。 与其他型号的区别: - 尺寸和耐压性:Artemis型AUV通常比一些小型AUV更大,能够承受更深水域的压力,这使得它能在更深的海域进行作业。
| 

 手机版ROVDIY
手机版ROVDIY